
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
about_pi
About Principal Investigator
About Me
experience
Honor Award, Modeling Contest in Mathematics
Published:
Honorable Award, Modeling Contest in Mathematics, Jun 2012.
Honor Award, Modeling Contest in Mathematics
Published:
Honorable Award, Modeling Contest in Mathematics, Jun 2012.
Third Prize, Academic Prize Award Scholarship, Tongji University
Published:
Third Prize, Academic Prize Award Scholarship, Tongji University, Jun 2013.
Tongji University-Yingda Road Cyclic Economy Scholarship
Published:
Tongji University-Yingda Road Cyclic Economy Scholarship, Jun 2013.
Annual Outstanding Student, Tongji University
Published:
Annual Outstanding Student, Tongji University, Sept 2013.
B.Sc. in Transportation Engineering, Tongji University
Published:
B.Sc. in Transportation Engineering, Tongji University, Jul 2014.
Minor in Mathematics, Tongji University
Published:
Minor in Mathematics, Tongji University, Jul 2014.
UF International Center Outstanding Academic Reward, University of Florida
Published:
UF International Center Outstanding Academic Reward, University of Florida, Jan 2015.
M.Sc in Civil and Coastal Engineering, University of Florida
Published:
M.Sc in Civil and Coastal Engineering, University of Florida, Aug 2016.
Third Place, Annual Interdisciplinary Design/Build Competition Challenges, University of Michigan
Published:
Third Place, Annual Interdisciplinary Design/Build Competition Challenges, University of Michigan.
Engineering Innovation Award, 13th Engineering College Symposium, University of Michigan
Published:
Engineering Innovation Award, 13th Engineering College Symposium, University of Michigan, Oct 2018.
Champion of the second annual Transportation Technology Tournament
Published:
Champion of the second annual Transportation Technology Tournament, Jul 2019.
Best Presentation Award, Young Professionals Lightning Talk Session, 23rd COTA Winter Symposium
Published:
Best Presentation Award, Young Professionals Lightning Talk Session, 23rd COTA Winter Symposium, Jan 2020.
President of Michigan Transportation Student Organization
Published:
President of Michigan Transportation Student Organization.
Anna Olcott Smith Award, Rackham Graduate School, University of Michigan
Published:
Anna Olcott Smith Award, Rackham Graduate School, University of Michigan, Apr 2020.
Organizing Committee Member of Emerging Mobility Services and Systems Seminar Series (EM4S)
Published:
Organizing Committee Member of Emerging Mobility Services and Systems Seminar Series (EM4S), Jun 2020 – Sep 2020.
Ph.D. in Next Generation Transportation Systems Program, University of Michigan
Published:
Ph.D. in Next Generation Transportation Systems Program, University of Michigan, Jul 2020.
Postdoctoral Research Fellow, University of Michigan
Published:
Postdoctoral Research Fellow, University of Michigan, Jul 2020 – Jun 2021.
group
Hangyu Li (Graduated in 2023)
Hangyu Li (Graduated in 2023)
Yiman Bao
Yiman Bao
Zhicheng Jin
Zhicheng Jin
Chin Fung Yau (Graduated in 2024, co-supervised)
Chin Fung Yau (Graduated in 2023)
Nan Su (Graduated in 2025, co-supervised)
Nan Su (Graduated in 2025, co-supervised)
Yangjie Gao (Graduated in 2025, co-supervised)
Yangjie Gao (Graduated in 2025, co-supervised)
Manlian Pan (Graduated in 2026)
Manlian Pan (Graduated in 2026)
Haoyu Mo (2022 Spring)
Haoyu Mo (2022 Spring)
Chaoyu Wu (2024 Spring)
Chaoyu Wu (2024 Spring)
Xinzhu Ren (2024 Spring)
Xinzhu Ren (2024 Spring)
Chenglin Zhuang (2024 Fall)
Role: Ph.D. Student
Research Interests: Generalized nash equilibrium problem in intelligent transportation
Bio: Chenglin received his Bachelor of Information Management and Information Systems from Northeastern University, followed by a Master of Management Science and Engineering from Shenzhen University. His research centers on Generalized Nash Equilibrium Problems (GNEPs) in intelligent transportation systems. 
Junying MA (2025 Fall)
Role: Ph.D. Student
Research Interests: Data Mining, AI for Transportation Bio: Junying received his Bachelor’s degree in Economics from Jinan University and M.Phil. degree in Financial Technology from the Hong Kong University of Science and Technology, Guangzhou Campus. His research interests includes Data Mining and AI for Transportation. 
Miaowei XI (2025 Fall)
Miaowei XI (2025 Fall)
Yiling Luo (Graduated in 2025)
Yiling Luo (Graduated in 2025)
Wenjie ZHU (2024 Fall)
Wenjie ZHU (2024 Fall)
Wenwen Jing
Wenwen Jing
Ziye Guo
Role: Research Assistant. Research Interests: Federated Learning.
Bio: Ziye graduated from Bejing University of Post and Telecommunications. His research interst includes federated learning and LLM agents.
Xin An (2026 Spring)
Xin An (2026 Spring)
Shangtao Wu
Shangtao Wu
portfolio
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
publications
Comparative study on the capacity of a signalised roundabout
Published in IET Intelligent Transport Systems, 2016
This paper provides a comparative study on the capacity of signalized roundabouts.
Recommended citation: Sun, Xiaotong, Wanjing Ma*, and Wei Huang. (2016). "Comparative study on the capacity of a signalised roundabout." IET Intelligent Transport Systems, 10.3, 175-185.
Download Paper | Download Slides
A simulation study on max pressure control of signalized intersections
Published in Transportation Research Record, 2018
This paper presents a simulation study on max pressure control for signalized intersections.
Recommended citation: Sun, Xiaotong, and Yafeng Yin* (2018). "A simulation study on max pressure control of signalized intersections." Transportation Research Record, 2672.18, 117-127.
Download Paper | Download Slides
Methods for the design of safety service patrol beats: the Florida Road Ranger case study
Published in Transportation Research Record, 2018
This paper discusses methods for designing safety service patrol beats in Florida.
Recommended citation: Sun, X., Shahabi, M., Carrick, G., Yin, Y*., Srinivasan, S., & Shirmohammadi, N. (2018). "Methods for the design of safety service patrol beats: the Florida Road Ranger case study." Transportation Research Record, 2672(14), 50-60.
Download Paper | Download Slides
Behaviorally stable vehicle platooning for energy savings
Published in Transportation Research Part C: Emerging Technologies, 2019
This paper presents a study on behaviorally stable vehicle platooning for energy savings.
Recommended citation: Sun, X., & Yin, Y*., (2019). "Behaviorally stable vehicle platooning for energy savings." Transportation Research Part C: Emerging Technologies, 99, 37-52.
Download Paper | Download Slides
Integrated Planning of Static and Dynamic Charging Infrastructure to Support Electric Vehicles for Inter-city Trips
Published in Transportation Research Part D: Transport and Environment, 2020
This paper discusses integrated planning of static and dynamic charging infrastructure for electric vehicles.
Recommended citation: Sun, X., Chen, Z., and Yin, Y*., (2020). "Integrated Planning of Static and Dynamic Charging Infrastructure to Support Electric Vehicles for Inter-city Trips." Transportation Research Part D: Transport and Environment, 83, 102331.
Download Paper | Download Slides
An auction mechanism for platoon leader determination in single-brand cooperative vehicle platooning
Published in Economics of Transportation, 2021
This paper proposes an auction mechanism for platoon leader determination in vehicle platooning.
Recommended citation: Sun, X*., & Yin, Y. (2021). "An auction mechanism for platoon leader determination in single-brand cooperative vehicle platooning." Economics of Transportation, 28, 100233. [ECOTRA][PDF(pre-print)]
Download Paper | Download Slides
Decentralized game-theoretical approaches for behaviorally-stable and efficient vehicle platooning
Published in Transportation Research Part B: Methodological, 2021
This paper proposes a decentralized game-theoretical approach for vehicle platooning.
Recommended citation: Sun, X., & Yin, Y*. (2021). "Decentralized game-theoretical approaches for behaviorally-stable and efficient vehicle platooning." Transportation Research Part B: Methodological, 153, 45-69. [TR-Part B][PDF(pre-print)]
Download Paper | Download Slides
Investigating the Potential of Truck Platooning for Energy Savings: Empirical Study of the US National Highway Freight Network
Published in Transportation Research Record, 2021
This paper investigates the potential of truck platooning for energy savings in the US national highway freight network.
Recommended citation: Sun, X., Wu, H., Abdolmaleki, M., Yin, Y*., & Zou, B. (2021). "Investigating the Potential of Truck Platooning for Energy Savings: Empirical Study of the US National Highway Freight Network." Transportation Research Record, 03611981211031231. [TRR][PDF(pre-print)]
Download Paper | Download Slides
Exploring the Role of Mobility-as-A-Service in Morning Commuting Trips
Published in Transportation Research Part B (Under Review), 2023
This paper explores the role of MaaS in morning commuting trips.
Recommended citation: Pan, M., Sun, X. (2023). "Exploring the Role of Mobility-as-A-Service in Morning Commuting Trips." Transportation Research Part B. (Under Review).
Download Paper | Download Slides
The dual effects of team contest design on on-demand service work schedules
Published in Service Science, 2023
This paper discusses the dual effects of team contest design on on-demand service work schedules.
Recommended citation: Dong, T., Sun, X., Luo, Q*., Wang, J., & Yin, Y. (2023). "The dual effects of team contest design on on-demand service work schedules." Service Science. [SSRN]
Download Paper | Download Slides
Joint operation planning of drivers and trucks for semi-autonomous truck platooning
Published in Transportmetrica A: Transport Science, 2023
This paper focuses on joint operation planning for semi-autonomous truck platooning.
Recommended citation: Hao, Y., Chen, Z., Jiangang Jin, Sun, X. (2023). "Joint operation planning of drivers and trucks for semi-autonomous truck platooning." Transportmetrica A: Transport Science. [TransA]
Download Paper | Download Slides
On the Robotic Uncertainty of Fully Autonomous Traffic
Published in Transportation Research Part B (Under Review), 2023
This paper discusses the robotic uncertainty in fully autonomous traffic.
Recommended citation: Li, H., Sun, X. (2023). "On the Robotic Uncertainty of Fully Autonomous Traffic." Transportation Research Part B. (Under Review).
Download Paper | Download Slides
Joint operation planning of drivers and trucks for semi-autonomous truck platooning
Published in Transportmetrica A: Transport Science, 2023
This paper focuses on joint operation planning for semi-autonomous truck platooning.
Recommended citation: Hao, Y., Chen, Z., Jin, J., Sun, X. (2023). "Joint operation planning of drivers and trucks for semi-autonomous truck platooning." Transportmetrica A: Transport Science. (Accepted).
Download Paper | Download Slides
Hub-Based Platoon Formation: Optimal Release Policies and Approximate Solutions
Published in IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, 2024
This study optimizes truck platoon formation at highway hubs under decentralized, distributed, and centralized policies by developing dynamic programming-driven release thresholds and receding horizon solutions, revealing that decentralized strategies—despite yielding ~3.5% and 8% lower rewards than distributed and centralized approaches—achieve near-optimal performance without inter-hub coordination, validated via simulations on Swedish highway hubs.
Recommended citation: Johansson, A., Nekouei, E., Sun, X., Johansson, K. H., & Mårtensson, J. (2023). Hub-based platoon formation: Optimal release policies and approximate solutions. IEEE Transactions on Intelligent Transportation Systems, 25(6), 5755-5766.
Economic Analysis of On-Street Parking with Urban Delivery
Published in TRANSPORTATION SCIENCE, 2024
This study examines the impact of delivery-driven curb parking demands on urban curb dynamics through continuum modeling and comparative statics, revealing that optimized metered parking pricing for general users outperforms dedicated delivery bays and duration caps, with demand source-dependent strategies and adaptive bay sizing proving critical to curb management efficiency, thereby challenging the necessity of delivery-specific infrastructure under optimal pricing.
Recommended citation: Xu, Z., & Sun, X. (2024). Economic Analysis of On-Street Parking with Urban Delivery. Transportation Science, 58(6), 1300-1318.
A data-driven approach to uncovering the charging demand of electrified ride-hailing services
Published in TRANSPORTATION RESEARCH PART D-TRANSPORT AND ENVIRONMENT, 2025
This study analyzes the distinct charging demand patterns of electric ride-hailing vehicles using trip data from 96,716 Shanghai-based vehicles, employs spatial regression models to reveal significant correlations between charging needs and built environment variables, and integrates supply-side data to evaluate public charging infrastructure sufficiency, uncovering spatiotemporal demand variations and spatial lag effects.
Recommended citation: Jin, Z., Sun, X., Xu, Z., & Tu, H. (2025). A data-driven approach to uncovering the charging demand of electrified ride-hailing services. Transportation Research Part D: Transport and Environment, 139, 104599.
Hierarchical prediction uncertainty-aware motion planning for autonomous driving in lane-changing scenarios
Published in TRANSPORTATION RESEARCH PART C-EMERGING TECHNOLOGIES, 2025
This study evaluates the energy-saving benefits of truck platooning across the US national highway freight network by integrating aerodynamic modeling with large-scale traffic simulations, revealing significant fuel efficiency gains and reduced emissions through optimized inter-vehicle coordination, validated via real-world freight corridor data.
Recommended citation: Yao, R., & Sun, X. (2025). Hierarchical prediction uncertainty-aware motion planning for autonomous driving in lane-changing scenarios. Transportation Research Part C: Emerging Technologies, 171, 104962.
Planning of truck platooning for road-network capacitated vehicle routing problem
Published in TRANSPORTATION RESEARCH PART E-LOGISTICS AND TRANSPORTATION REVIEW, 2025
This study pioneers the integration of truck platooning into capacitated vehicle routing problems with time windows (CVRPTW) by developing a road network-based optimization framework and a three-stage algorithm to minimize total costs—including dispatch and energy expenses—while serving multi-customer demands, with numerical experiments validating the model’s efficacy and quantifying platooning’s cost-saving potential in real-world logistics operations.
Recommended citation: Hao, Y., Chen, Z., Sun, X., & Tong, L. (2025). Planning of truck platooning for road-network capacitated vehicle routing problem. Transportation Research Part E: Logistics and Transportation Review, 194, 103898.
On the robotic uncertainty of fully autonomous traffic: From stochastic car-following to mobility–safety trade-offs
Published in TRANSPORTATION RESEARCH PART C:Emerging Technologies, 2025
This paper presents an analytical model framework that delineates the endogenous reciprocity between traffic safety and mobility that arises from AVs’ robotic uncertainties. Using both realistic car-following data and a stochastic intelligent driving model (IDM), the stochastic car-following distance is derived as a key parameter, enabling analysis of single-lane capacity and collision probability. A semiMarkov process is then employed to model the dynamics of the lane capacity, and the resulting collision-inclusive capacity, representing expected lane capacity under stationary conditions, serves as the primary performance metric for fully autonomous traffic. The analytical results are further utilized to investigate the impacts of critical parameters in AV and roadway designs on traffic performance, as well as the properties of optimal speed and headway under mobilitytargeted or safety-dominated management objectives.
Recommended citation: Li, H., Sun, X., Zhuang, C., & Li, X. (2025). On the robotic uncertainty of fully autonomous traffic: From stochastic car-following to mobility–safety trade-offs. Transportation Research Part C: Emerging Technologies, 178, 105254.
Download Paper
resources
Autonomous Vehicles Car-following Behavior Data
Car-following behavior data in autonomous driving scenarios(https://doi.org/10.5281/zenodo.14995837). This dataset contains processed longitudinal car-following behavior data derived from the Waymo Open Dataset, specifically focusing on autonomous vehicle (AV) operations in stable traffic scenarios. The data captures interactions between leading vehicles (LVs) and following AVs (FAVs) to analyze stochastic car-following distances and speed regulation patterns.
Börgers, T. (2015). An introduction to the theory of mechanism design.
Börgers, T. (2015). An introduction to the theory of mechanism design. Oxford University Press, USA.
“Chicken Soup” for Ph.D students
“Chicken Soup” for Ph.D students: A useful resource for those navigating the challenges of a Ph.D.
Facchinei, F., & Pang, J. S. (2007). Finite-dimensional variational inequalities and complementarity problems.
Facchinei, F., & Pang, J. S. (2007). Finite-dimensional variational inequalities and complementarity problems. Springer Science & Business Media.
Freight Analysis Framework (version 4)
Freight Analysis Framework (version 4): Freight Analysis Framework Link
GitHub Transportation Networks
GitHub Transportation Networks: GitHub Link
Kahneman, D. (2011). Thinking, fast and slow.
Kahneman, D. (2011). Thinking, fast and slow. A must-read book on decision-making processes.
Check our group’s website: Lab for Innovative Mobility Systems!
Check our group’s website: Lab for Innovative Mobility Systems!
Roughgarden, T. (2016). Twenty lectures on algorithmic game theory.
Roughgarden, T. (2016). Twenty lectures on algorithmic game theory. Cambridge University Press.
Shoham, Y., & Leyton-Brown, K. (2008). Multiagent systems: Algorithmic, game-theoretic, and logical foundations.
Shoham, Y., & Leyton-Brown, K. (2008). Multiagent systems: Algorithmic, game-theoretic, and logical foundations. Cambridge University Press.
A survival guide to a PhD
A survival guide to a Ph.D. — helps students navigate their academic journey.
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.
updates
Manlian past her PQE and officially became a Ph.D. candidate.
Published:
Manlian passed her PQE and officially became a Ph.D. candidate.
Hangyu defended his master’s thesis entitled “On the robotic uncertainty of fully autonomous traffic“.
Published:
Hangyu defended his master’s thesis entitled “On the robotic uncertainty of fully autonomous traffic“. 
Xiaotong presented at Tong Lu Ren Academic Forum held by the College of Transportation Engineering, Tongji University.
Published:
Xiaotong presented at Tong Lu Ren Academic Forum held by the College of Transportation Engineering, Tongji University. Thanks Dr. Manjing Ma’s invitation. 
Xiaotong presented at the Application of Deep Learning & Data Science in Transportation and Smart City Workshop held by NYU Shanghai and Tongji University.
Published:
Xiaotong presented at the Application of Deep Learning & Data Science in Transportation and Smart City Workshop held by NYU Shanghai and Tongji University. Thanks Dr. Zhibin Chen’s invitation. 
Xiaotong attended TSL2023 in Chicago, U.S., and made presentations.
Published:
Xiaotong attended TSL2023 in Chicago, U.S., and made presentations. Xiaotong’s proposals, entitled “Autonomous Traffic Efficiency and Safety under Perception Uncertainty: The Integrated Analysis and Countermeasures”, and “Mechanism Design and Optimization for the Mobility-as-a-Service” are awarded by the Guangzhou Municipal Science and Technology Bureau, granting RMB 300,000 in total.
Haoyu and Xiaotong attended the 14th Workshop on Computational Transportation Science (CTS2023) in Shanghai and made presentations.
Published:
Haoyu and Xiaotong attended the 14th Workshop on Computational Transportation Science (CTS2023) in Shanghai and made presentations. 
Xiaotong‘s proposals, entitled “Autonomous Traffic Efficiency and Safety under Perception Uncertainty: The Integrated Analysis and Countermeasures”, and “Mechanism Design and Optimization for the Mobility-as-a-Service” are awarded by the Guangzhou Municipal Science and Technology Bureau, granting RMB 300,000 in total.
Published:
Xiaotong‘s proposals, entitled “Autonomous Traffic Efficiency and Safety under Perception Uncertainty: The Integrated Analysis and Countermeasures”, and “Mechanism Design and Optimization for the Mobility-as-a-Service” are awarded by the Guangzhou Municipal Science and Technology Bureau, granting RMB 300,000 in total.
Xiaotong made a presentation hosted by the School of Intelligent Systems Engineering at Sun Yat-Sen University.
Published:
Xiaotong made a presentation hosted by the School of Intelligent Systems Engineering at Sun Yat-Sen University. Thanks to Dr. Jiemin Xie’s invitation. 
Haoyu passed his PQE and officially became a Ph.D. candidate.
Published:
Haoyu passed his PQE and officially became a Ph.D. candidate.
Xinzhu attended Transportation Science and Logistics Conference in Seoul,Korea from May 19 to 21, 2025, and made presentations.
Published:
Xinzhu attended the Transportation Science and Logistics Conference in Seoul, South Korea, from May 19 to 21, 2025, where she delivered a presentation titled “A Deep Reinforcement Learning Framework for Truck Platoon Schedule Coordination.” 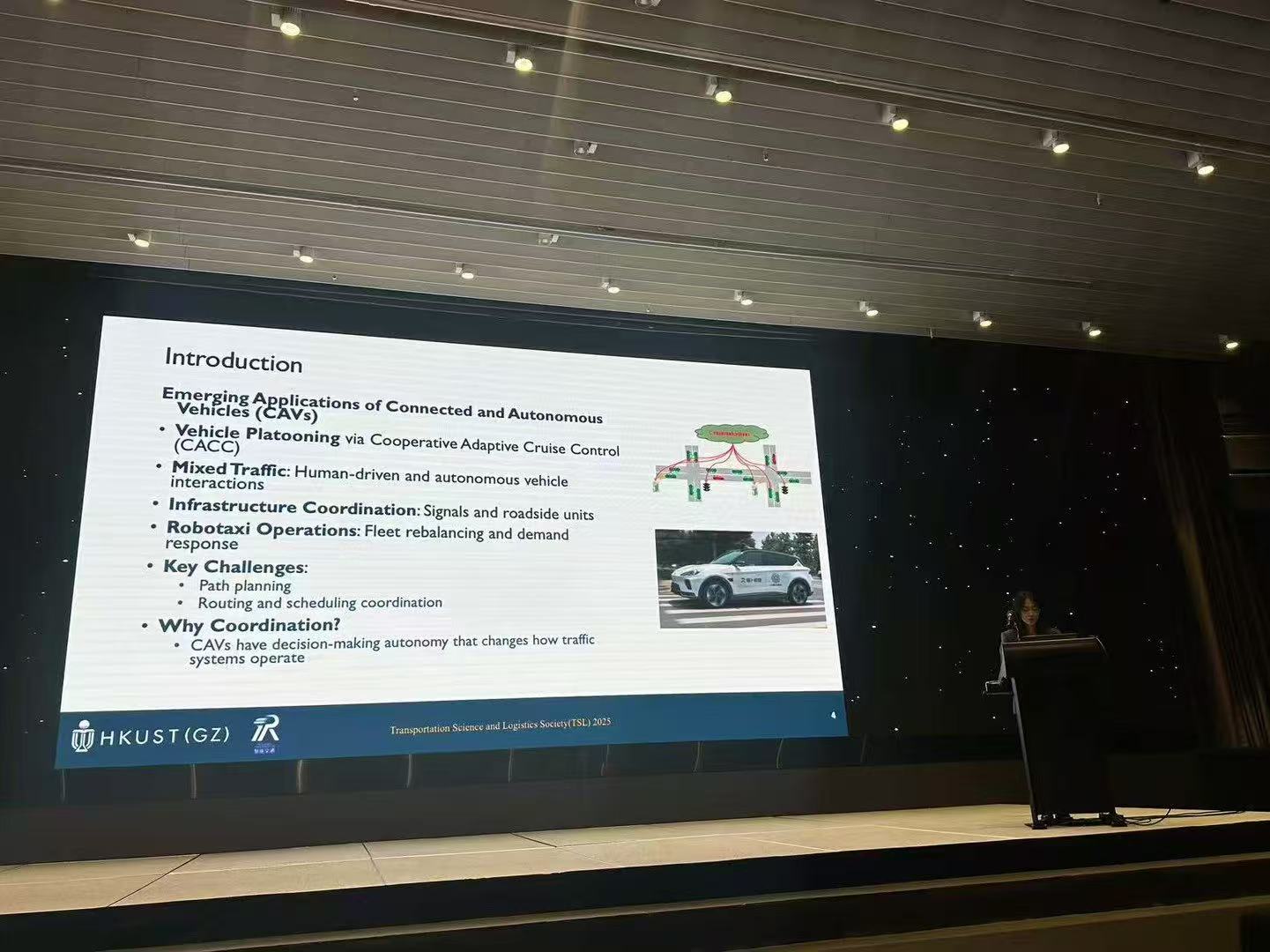
Hangyu and Chenglin published an article in Transportation Research Part C on June 22, 2025,
Published:
On June 22, 2025, Hangyu and Chenglin published an article in Transportation Research Part C entitled “On the Robotic Uncertainty of Fully Autonomous Traffic: From Stochastic Car-Following to Mobility–Safety Trade-offs.”
Chaoyu attended ITEA in Northwest University, Chicago, America from June 23 to 27, 2025, and made presentations.
Published:
Chaoyu attended ITEA in Northwest University, Chicago, America from June 23 to 27, 2025, and made presentations.
Manlian, Miaowei, and Wenjie attended the 16th International Workshop on Computational Transportation Science, held in Wuhan, China, from July 25 to 27, 2025, where they delivered presentations.
Published:
Manlian, Miaowei, and Wenjie attended the 16th International Workshop on Computational Transportation Science, held in Wuhan, China, from July 25 to 27, 2025. At the workshop, Manlian delivered a presentation titled “What Determines Travelers’ Acceptance of MaaS? Insights from a Meta-Analysis”, Miaowei presented “Data-Driven Agent Simulation for Urban Delivery: Integrating Personality via Large Language Models”, and Wenjie presented “Unlocking Low-Altitude Airspace Supply.” 
Advance Notice: Xiaotong will attend ISTDM 2025 in Montréal, Canada, from September 3–5, 2025, and deliver presentations.
Published:
Xiaotong will attend ISTDM 2025 in Montréal, Canada, from September 3–5, 2025, and deliver presentations.
Happy Teachers’ Day
Published:
Happy Teachers’ Day 
MODES attended INFORMS Annual Meeting 2025 at Atlanta, GA, Oct 27th to Oct 29th.
Published:
And delivered three presentations.
1. Economic Analysis of On-Street Parking with Urban Delivery
Presenter: Dr. Xiaotong Sun
Session: MC21 - TSL Best Paper Award and TS Journal Paper of the Year award
Time & Location: Mon, Oct 27, 14:00 - 15:27, GMT-4. Building A Level 4 A407
 Dr. Xiaotong Sun, in collaboration with Dr. Zhengtian Xu from The George Washington University, has received the Transportation Science Paper of the Year Award for their article published in Transportation Science, titled “Economic Analysis of On-Street Parking with Urban Delivery”.
Dr. Xiaotong Sun, in collaboration with Dr. Zhengtian Xu from The George Washington University, has received the Transportation Science Paper of the Year Award for their article published in Transportation Science, titled “Economic Analysis of On-Street Parking with Urban Delivery”.
INTR Academic Star Gathering – Spotlight Poster Event (Oct 29, 2025)
Published:
On October 29, 2025, the first INTR Academic Star Gathering – Spotlight Poster Event was successfully held at iPark. Seven students (six PhD students and one Master’s student) presented their research posters showcasing the latest progress of their work.
MODES attended the 29th HKSTS Conference at Hong Kong SAR (8-9 December, 2025).
Published:
And delivered two presentations.
1. A Deep Reinforcement Learning Framework for Hub-based Truck Platoon Schedule Coordination
Presenter: Xinzhu Ren
Session: B2, Cooperative Autonomous Driving, led by Dr. Xiaotong Sun.
Manlian defended his PhD’s thesis entitled “On the Viability of Mobility-as-a-Service Integration: Equilibrium Analyses and Empirical Evidence”.
Published:
Manlian defended his PhD’s thesis entitled ”On the Viability of Mobility-as-a-Service Integration: Equilibrium Analyses and Empirical Evidence“.
Chenglin’s extended abstract has been accepted to the TSL Conference 2026. (Acceptance date: March 3, 2026)
Published:
On March 3, 2026, Chenglin’s extended abstract titled “Benefit Redistribution Mechanisms for Multi-Operator Truck Platooning in Stackelberg-Generalized Nash Game Perspective” has been accepted to the TSL Conference 2026